 |
ДРАЙВЕРЫ ДЛЯ ШАГОВЫХ ДВИГАТЕЛЕЙ |
1. Введение (Транслятор-драйвер)
2.Cхема однополюсного драйвера
3.Cхема двуполярного драйвера.
4. Примеры схем трансляторов выполненых на микросхемах
5. Драйвер на микросхеме LB1656
6. Промышленные драйвера RTA
6.1 Драйвера RTA серии NDC
6.2 Драйвера RTA серии GMH
6.3 Драйвера RTA серии GMD
7. Промышленные драйвера IMS
7.1 Драйвера IMS серии IB462-IB463
7.2 Драйвера IMS серии IB104,IB106,IB1010
1. Введение (Транслятор-драйвер)
Устройство ответственное за формирование сигналов, шагов и направления в обмотки двигателя, называется транслятор. Большинство систем управления шаговыми двигателями наряду с транслятором включают драйвер (Driver) для увеличения электротока подающегося на обмотки двигателя. Часто драйвер объединен с транслятором и называется одним словом драйвер.
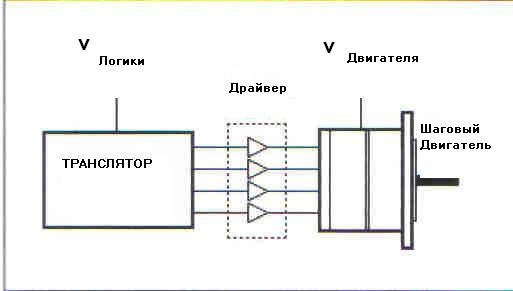
Схема 1- Типичное транслятор /драйвер (driver) соединение
Основной пример " транслятор + драйвер" типовая конфигурация . Обратите внимание на разделеное напряжение питания логики и шагового двигателя. Обычно двигатель требует другого напряжения, чем логическая часть системы. Как правило для логической части системы необходимое напряжение +5 V DC (постояного тока), а у шаговых двигателей электрическое напряжение может колебаться от +5 в постоянного тока (V DC) до 48 в постоянного тока(V DC). Драйвер имеет также "открытый коллектор" , через который подается земля (GND) для активизации обмоток двигателя . Поскольку электрическая цепь у большенства полупроводников более пригодна для подачи земли или отрицательного напряжения, чем источник (выходного положительного напряжения).
2.Cхема однополюсного драйвера
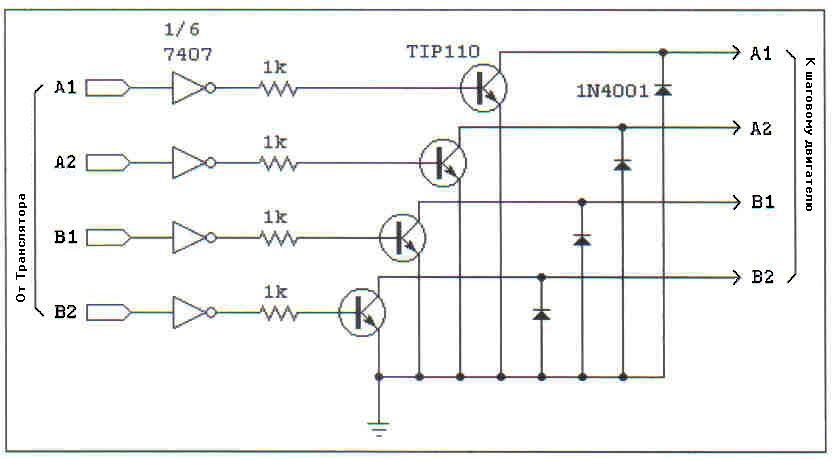
Схема 2 - Типичная электрическая схема однополюсного драйвера. Примечание: имеются 4 защитных диода включенных в обратном направлении.
3.Cхема двуполярного драйвера.
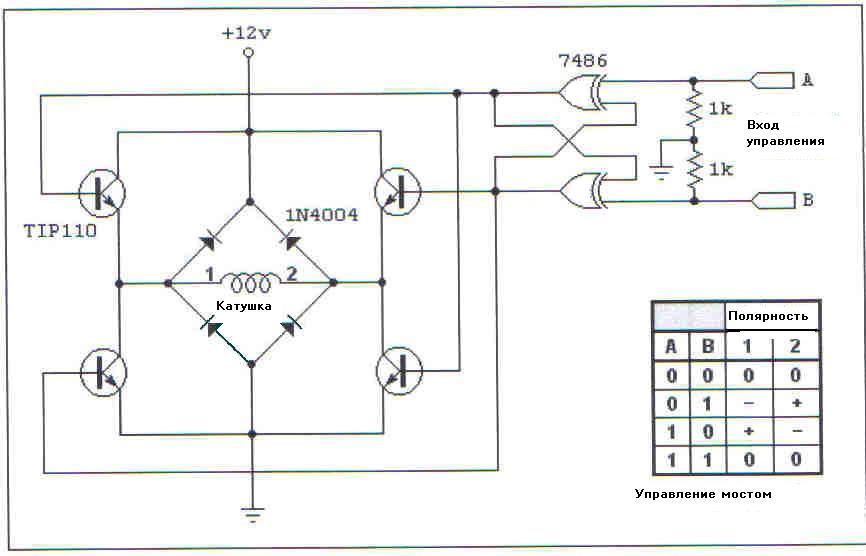
Схема 3 - Типичная мостовая электрическая схема двуполярного драйвера.
Имеются специально разработанные микросхемы для управления двуполярными шаговыми двигателями (или моторами постоянного тока (DC)) серии L297/298 у ST Microelectronics, и LMD18T245 у National Semiconductor. Обычно это 1C модули.

4.Примеры схем трансляторов выполненых на микросхемах
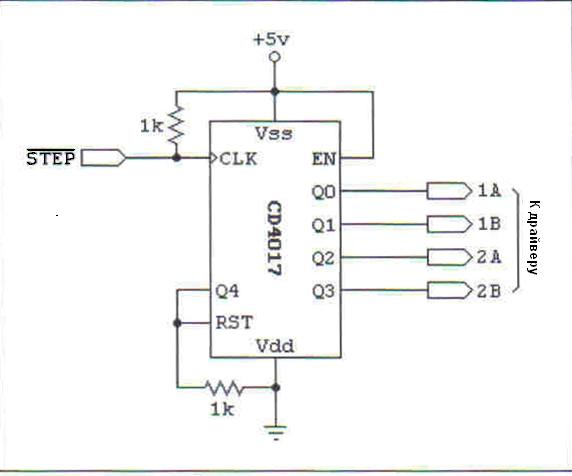
Схема 4 - Пример электрической схемы транслятора для двух-фазного драйвера шагового двигателя, работающего в одном напрвлении.
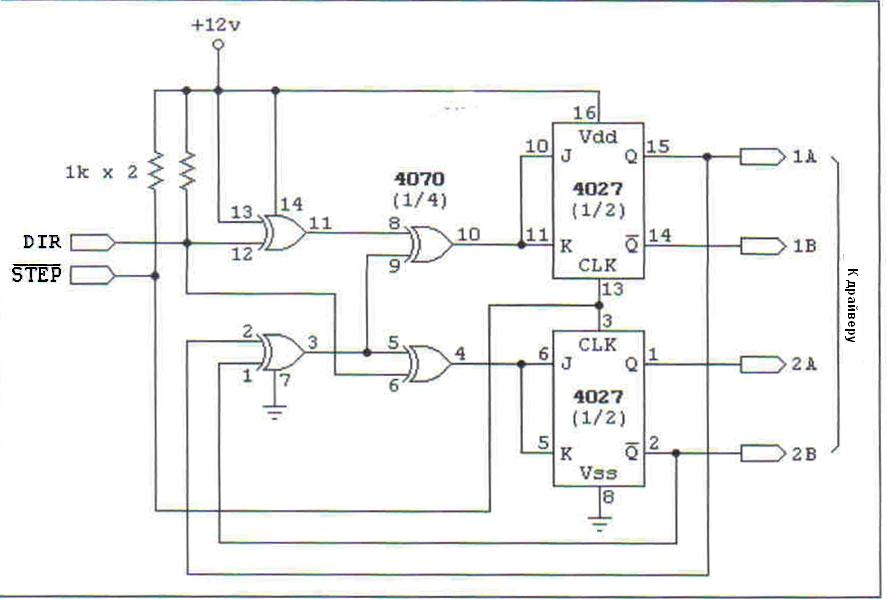
Схема 5 - Пример электрической схемы транслятора для двух-фазного драйвера шагового двигателя, работающего в двух напрвлениях.
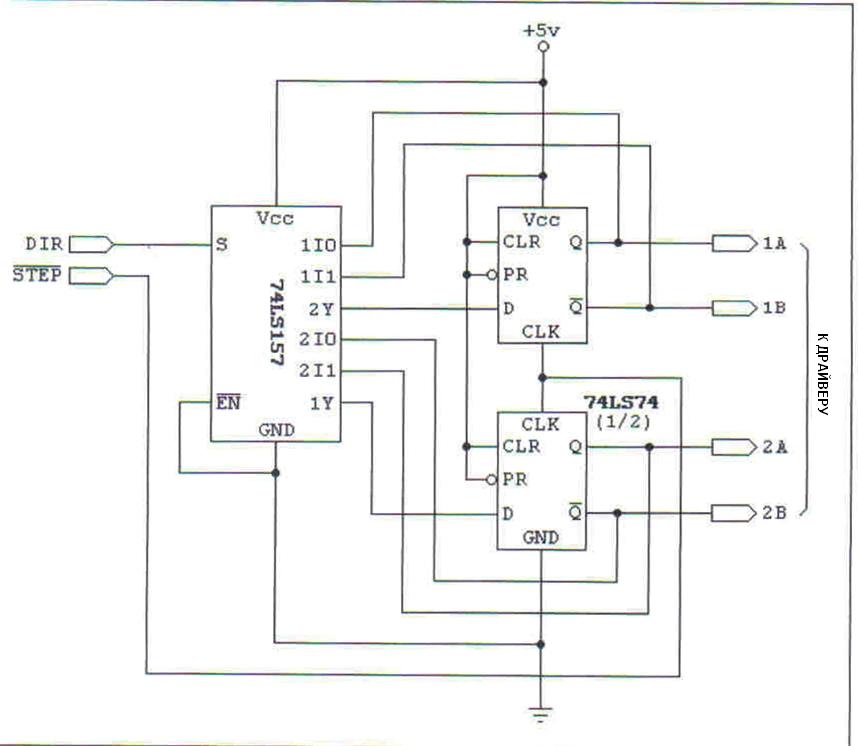
Схема 6 - другой пример электрической схемы 2-х фазного драйвер-транслятора с использованием мультиплексора.
5.Драйвер на микросхеме LB1656
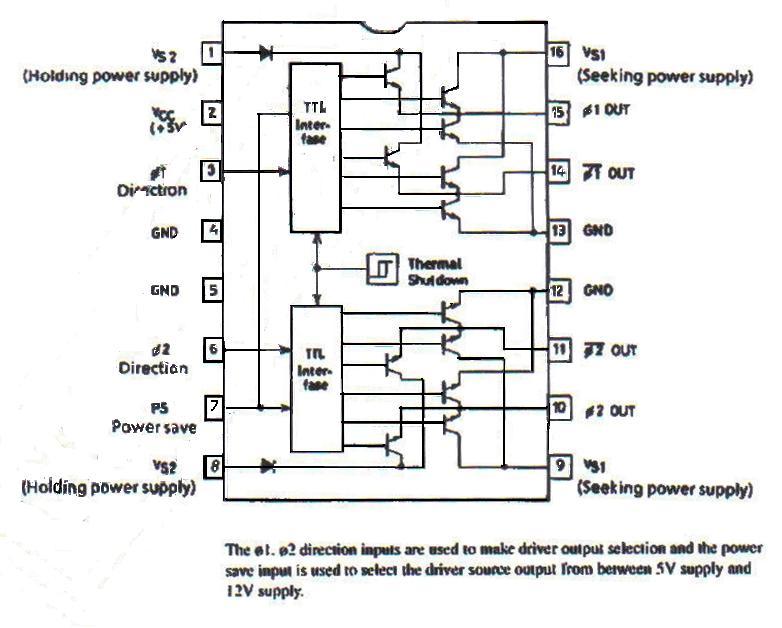
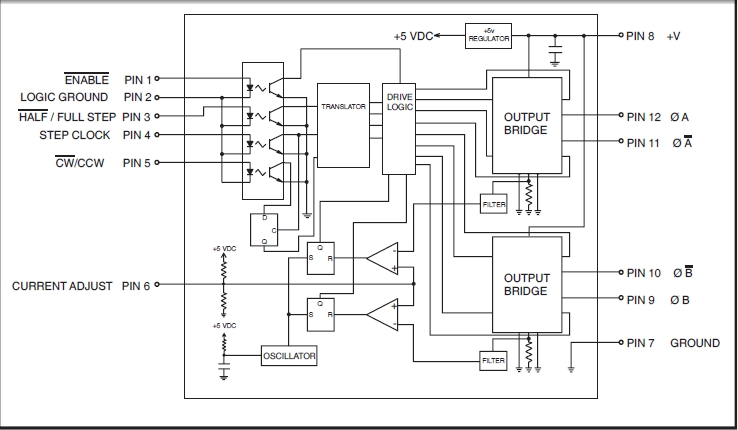
Ниже показан драйвер для двухфазного, двуполярного шагового двигателя, выполненый на микросхеме LB1656, применяемый в накопителях на гибких дисках.
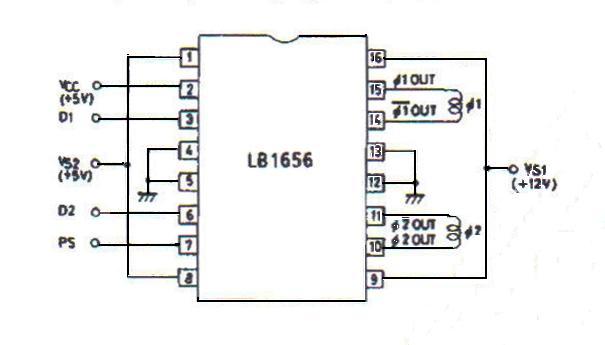
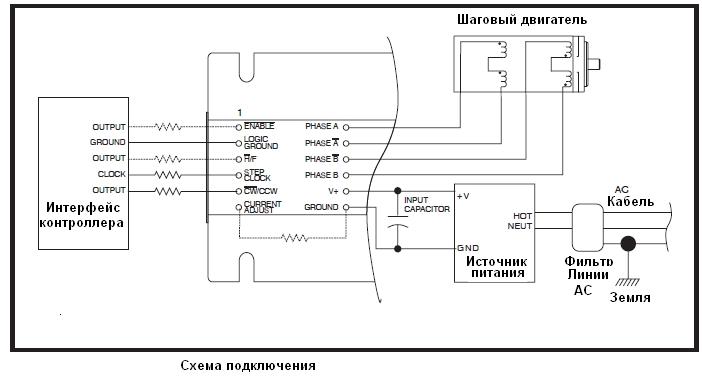
Ниже показан пример подключения 2-х фазного двухполюсного шагового двигателя.
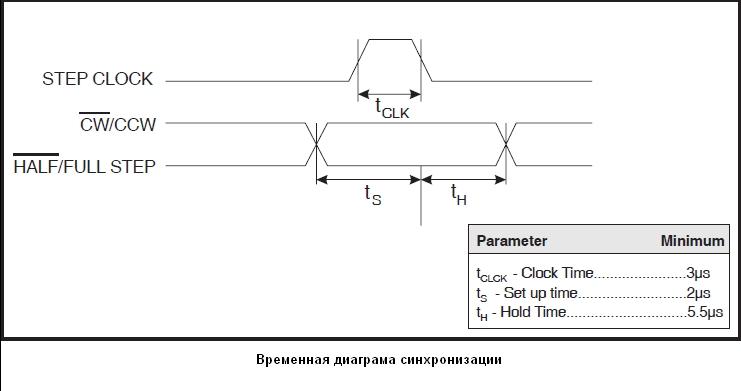
Временная диаграмма:

6. Промышленные драйвера RTA
Из промышленных драйверов, компактных, на практике показавших свою надежнсть, как при работе при высокой температуре, запыленности и влажности, драйвера итальянской фирмы RTA.
Данные драйвера совмещены с трансляторм и подключаются непосредственно к индексатору. Примечание: см. Индексатор.
6.1 Драйвера RTA серии NDC
NDC - серия малогаборитных драйверов для , пригодных для управления 2-х фазными шаговыми двигателями средней мощности, NDC драйверы имеют размеры: 101 x 94 x 25 mm . Они оснащены раздельными разъемами для лоических сигналов и разъемов питания. Разработаны для монтажа внутри металического отсека.


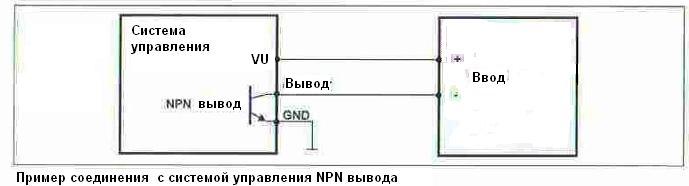
2(-); 3(+) вход сигнала "CURRENT OFF" : При этом сигнале ON - драйвер активен.При OFF - драйвер заторможен
электрическим током двигателя (и таким образом удерживается вращающий момент). При
этом поворот равен нулю. С помощью перемычке CO этот вход всегда в положении ON
(драйвер всегда активен).
4(-); 5(+) вход сигнала DIRECTION : С помощью этого сигнале при смене входного сигнала ON на OFF
двигатель меняет направление на противоположное. Этот сигнал должен поступить прежде
сигнала STEP на 100 мксек (или сигнала ENABLE) и оставаться в течении 100 мксек после
последнего поступившего STEP в драйвер (или блокировки входа ENABLE).
6(-); 7(+) Вход сигнала STEP (STEP режим управления), выполняется переключением трансляции
ON-OFF этого сигнала. Рекомендуемое заполнение импульсов 50% (Скважность 2). Максимальная
частота 60 Кгц. с квадратной формой импульса и амплитудой от 3,5 до 13 вольт,получаемой
от источника. Полупериод сигнала STEP должен быть больше 8 мксекунд.
Вход сигнала ENABLE (RUN режим управлени): при этом сигнале ON двигатель вращается в направлени
определяемом сигналом DIRECTION. При этом сигнале OFF двигатель останавливается и далее
удерживается в заблакированном состоянии нагрузкой 50% от вращающего (автоматическое
уменьшение эл,тока). Максимальная задержка разрешения (Enabling) или блокировки (Disabling)
менне 1,5 млсек. При вращении необходимое время менее 20 млсек.
8(-); 9(+) выход сигнала DRIVER FAULT : При этом выход шунтируется при нормльной работе драйвера.
При нерабочем состоянии драйвера шунт снимается. Драйвер автоматически уходит в нерабочее
состояние при активной защите и автоматически восстанавливается при сбросе защиты,
1; 10 INTERNAL GND: (внутрене взаимосвязаны и соеденны с контактами 12, 13 и 18). Гальванически
изолированны от логических входов и выходов и подключаются к общиму проводу источника питания.
Они могут быть подключены к экрану логического сигнального кабеля.

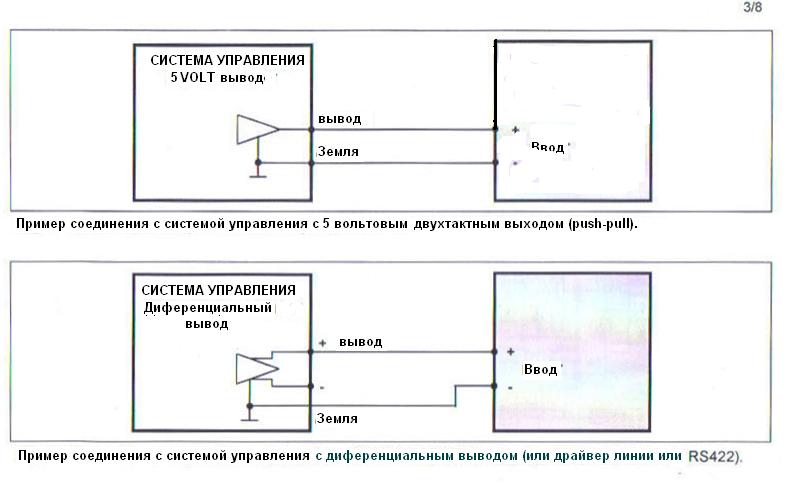
ПРИМЕРЫ СОЕДИНЕНЕНИЙ

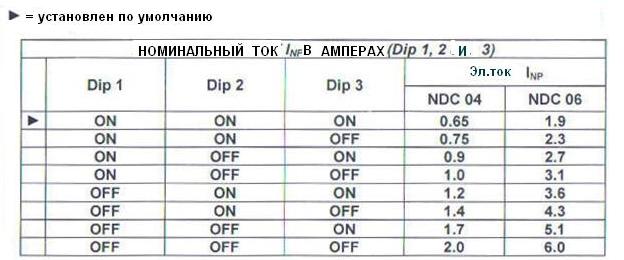
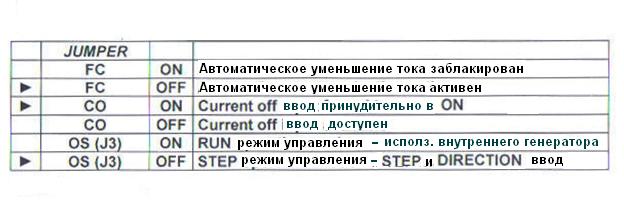
Основные установки (Микропереключатели (Dip ) и перемычки (jump))
Основные установки должны быть сделаны потребителем перед установкой или заменой, согласно типу двигателя и условиях работы. Неправильная установка может повредить драйвер или двигатель и вызвать не корректную работу двигателя.

Цепь электронного демпфирования гарантирует низкий акустический шум и уменьшает механическую вибрацию двигателя типичную для шаговых двигателей. При снижении количества шагов/оборот от максимально частоты установленной производителем системы управления и максимальной скорости оборотов запрашиваемых двигателем.
Для примера: с помощью управляющей системы с максимальной частотой 10 KHz., если необходима скорость 600 об/мин=10 обв/сек, то максимальное установить разрешение 10 000/10=1000 шагов/об.
STEP режим управления (перемычка OS/J3 не установлена)

DIP 5: РЕЗЕРВ, УСТАНОВЛЕН OFF/

Микропереключатель 5 и 6 устанавливает частоту генератора, микропереключатель 7 и 8 разрешение в шагах/об. Символ (R) указывает на косоугольный сигнал при старте и остановке, улучшающий старт-стоп исполение двигателя. В случае установки скорости в об/мин обратите внимание с косоугольным сигналом или без него. Выбор с более большего числа шагов/об вызывает вращение двигателя с меньшими шумами и уменьшает механическую вибрацию.
СВЕТОДИОДНЫЕ ИНДИКАТОРЫ (LED) СТАТУСА УПРАВЛЕНИЯ.
LED HV зеленый: светится = напряжение источника в рабочем диапазоне
не светится = нет напряжения от источника питания или напряжения не в рабочем диапазоне
LED FAU красный: светится = набор управления не в рабочем состоянии, из-за одной из следующих защит:
а - термозащита, если LED TER светится
в - мак. или мин. напряжение, если LED HV не светится
с - короткое замыкание или неправильно подсоединены выводы двигателя, если LED HV светится
не светится = управление активно, предусматривает, что LED HV светится
LED TER желтый: светится = набор управления не в рабочем состоянии из-за термозащиты.
не светится = управление активно, предусматривает, что LED HV светится
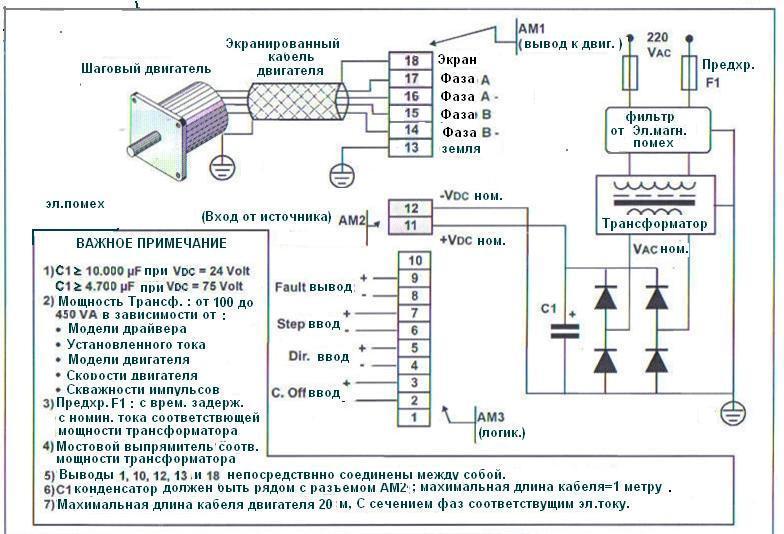
Драйвери и все связанные с ним кабели являются источником электромагнитных помех. В соотвествием с соглашениемо ECC дерективой 89/336 и стандартом (EN6 1800-3) должно быть сделано согласно ниже указанной схемы и по следующим пунктам:
• Расположение драйвера, источника питания, трансформатора и связанные с ними кабели должны
распологаться внутри той же самой металической коробки с герметизацией электромагнитных полей.
• Подключен электромагнитный фильтр между первичной обмоткой трансформатора и основой (CORCOM мод.
6VDK1). Расположение фильтра в близи входа питания . Использовать только экранированные кабели
(за пределами корзины) для соединения с моторм и драйвером.
• Должно быть сделано соединение с защитной землей и по возможности иметь минимальную индуктивность.
• Используемый трансформатор источника питания должен иметь экран между первичной и вторичной обмотками
и эта экранная обмотка должна быть соединена с заземлением.
ВВОДЫ ЭЛ.ПИТАНИ И ВЫВОДЫ (AMI и AM2 Разъем: см, черт. ниже )
11 - AM2 положительный полюс от источника питания (+ VDC ном)
12 - AM2 отрицательный полюс от источника питания (- VDC ном)
13 - AM1 Заземление; соединение с защитной землей (PE)
14 - AM1 Обмотка двигателя вывод B-
15 - AM1 Обмотка двигателя вывод B
16-AM1 Обмотка двигателя вывод A-
17-AM1 Обмотка двигателя вывод A
18-AM1 Точка соединения экрана экранированного кабеля двигателя.
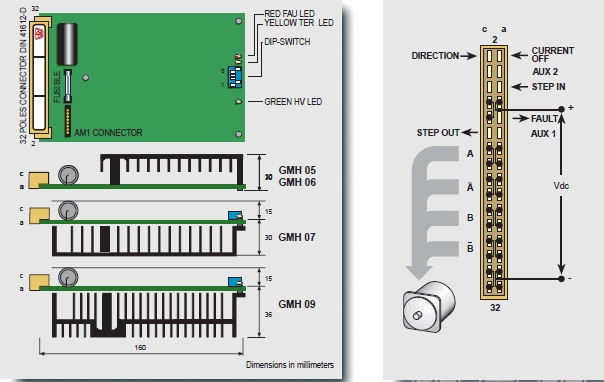
6.2 Драйвера RTA серии GMH

• Возможность работы с 400, 800, 1600, 3200 и 500, 1000, 2000, 4000 шагов/об..
• Сила эл.тока в фазах двигателя устанавливается с помощью микропереключателей. До четырех возможных значений между минимальным и максимальным токами.
• Автоматическое уменьшение эл.тока двигателя в мертвой точке.
• Возможность выключать ток в двигателе с помощью внешнего логического сигнала.
• Имеется защита от короткого замыкания двигателя.
• Защита против заниженного и завышеного напряжений.
• Защита от перегрева.
• Работает от одного источника питания
• Высокая эфективность прерывателя выполнего в выходном каскаде на MOП транзисторах.
• Два раздельных электрические цепи гарантируют низкий акустический шум и снижениеханической вибрации при низких и средних скоростях.

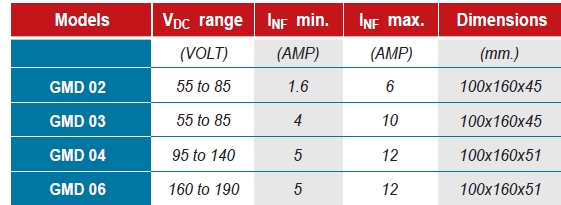
6.2 Драйвера RTA серии GMD

• Возможность работы с 200, 400 или 800 шагов/об..
• Сила эл.тока в фазах двигателя устанавливается с помощью микропереключателей. До четырех возможных значений между минимальным и максимальным токами.
• Автоматическое уменьшение эл.тока двигателя в мертвой точке.
• Возможность выключать ток в двигателе с помощью внешнего логического сигнала.
• Имеется защита от короткого замыкания двигателя.
• Защита против заниженного и завышеного напряжений.
• Защита от перегрева.
• Работает от одного источника питания
• Высокая эфективность прерывателя выполнего в выходном каскаде на MOП транзисторах.
• Два раздельных электрические цепи гарантируют низкий акустический шум и снижениеханической вибрации при низких и средних скоростях.

Сайт производителя драйверов RTA:http://www.rta.it
7. Промышленные драйвера IMS

Общие характкристики
• Очень низкая стоимость
• Единственный источник питания
• Логика фаз на одной плате
• Изолированный входы
• Исполнен ввиде радиатора (управляющая плата внутри радиатора)
• Чрезвычайно малый размер
• Частота до 250 kHz
• Полный и половинный шаг .
БЛОК СХЕМА ДРАЙВЕРОВ IMS
7.1 Драйвера IMS серии IB462- IB463

ТЕМПЕРАТУРА
ПРЕДЕЛЬНАЯ.......................................от -4O до +125° C
Рабочая..........................................от O до +5O° C
Корпуса [Max].................................... +7O° C
*Внешнее воздействие тепла может потребовать поддержки температуры корпуса
IB462
• Уровень входного напряжения (от +12 до +40 VDC).
• Уровень выходного тока (2A на фазу).
• Частота шагов 40 kHz
IB463
• Уровень входного напряжения (от +12 до +40 VDC).
• Уровень выходного тока (3,5 А на фазу)
• Частота шагов 40 kHz
7.2 Драйвера IMS серии IB104, IB106, IB1010

ТЕМПЕРАТУРА
ПРЕДЕЛЬНАЯ.......................................от -4O до +125° C
Рабочая..........................................от O до +5O° C
Корпуса [Max].................................... +7O° C
*Внешнее воздействие тепла может потребовать поддержки температуры корпуса
IB104
• Уровень входного напряжения (от +12 до +60 VDC).
• Уровень выходного тока (4A на фазу).
• Зашита по верхнему уровню напряжения.
• Частота шагов 250kHz
IB106
• Уровень входного напряжения (от +12 до +80 VDC).
• Уровень выходного тока (6 А на фазу)
• Зашита по верхнему уровню напряжения.
• Частота шагов 250kHz
IB1010
• Уровень входного напряжения (от +12 до +80 VDC).
• Уровень выходного тока (9 А на фазу)
• Зашита по верхнему уровню напряжения.
• Частота шагов 250kHz
Сайт производителя драйверов IMS: http://www.imshome.com